Autoguiding –
Strength Parameter
Die Nachführung eines Teleskops kann heute mit Hilfe von CCD Kameratechnik auch jedem Amateur gut nachgeführte Aufnahmen liefern. Die Nachführung funktioniert als einfaches Ist/Soll Steuerungsglied, das die Differenzen mittels eines CCD Kamerabildes am Leitrohr, auf einem Nachführchip oder einem interlaced Chip ermittelt. Die notwendigen Korrekturen, werden an die RA/DEC Motoren der Montierung weitergeleitet.
Soweit die Theorie. Nur leider stellt sich immer die Frage, wie eine Abstimmung der wichtigen Paramter zu realisieren ist. Die zentralen Steuerungsparameter sind
- L : Die Länge eines Korrekturimpulses – je nach Größe des RA/DEC Offsets muss ein langer oder kurzer Korrekturimplus von der Steuerungssoftware erzeugt werden.
- AG : Die Stärke des RA/DEC Autoguidings – die Steuerungselektronik der meisten Montierungen (LX200, G11, SkySensor2000, …) erlaubt die separate Angabe der RA und DEC Autoguiding Geschwindigkeit.
Diese Parameter müssen nun in Bezug auf die verwendete Aufnahmeoptik exakt abgestimmt werden. Die Brennweite beeinflusst die Abbildungsmassstab und hängt daher mit der Implusstärke zusammen. Ausserdem ist die mechanische Belastung und das verzögerte Reagieren der Montierung auf Impluse von der Zuladung der Montering abhängig. Hier ist zu empfehlen, auf die in vielen Handbüchern etc. beschriebene Art und Weise, die Backlask Korrektur, d.h. das Getriebespiel, der RA / DEC zu ermitteln und die entsprechenden Parameter zu setzen. Viele Versuche haben mir aber gezeigt, dass eine ruhige Nachführung nicht massgeblich von diesen Getriebespielwerten, sondern vielmehr von den Steuerimpluswerten abhängt.
Um für das eigene Setup eine Optimierung durchzuführen, empfiehlt es sich, die zentralen Parameter in einem Wert auszudrücken. Dieser Wert, die ‚Nachführungsstärke‘ S ist wie folgt definiert
S = AGRA/DEC × LRA/DEC
S = AGRA/DEC ÷ TelescopeSpeedRA/DEC
In der zweiten Zeile ist die Länge des Korrekturimpulses durch die ‚Telescope Speed‘ ersetzt. Dieser etwas missverständlich formulierte Parameter wird von dem Programm AstroArt verwendet, um die Impulsstärke zu definieren. Je kleiner die TelescopeSpeed angegeben wird, dest länger wird der Korrekturimplus – hier existiert ein einfacher reziproker Zusammenhang wie Fabio Cavicchio, einer der Programmierer von www.msb-astroart.com , bestätigte. Leider kenne ich nicht die Parameter, die von anderen Software-Steuerungsprogrammen verwendet werden, doch ich denke, dass sich immer eine Beziehung zwischen der Pulslänge und dem eingestellten Parameterwert angeben lässt. Meist kann man auf einfache Art und Weise am zur Montierungssteuerung oft verwendeten COM1 Ausgang ohne grossen Aufwand die Pulslänge mit einem selbstgeschriebenen Timer-Programm ermitteln und diese Beziehung selbst ermitteln.
Trägt man nun eine zweidimensionale Darstellung der Nachführungsstärke S auf, so erkennt man Bereiche gleicher Stärke. In diesen Bereichen reagiert die Nachführung auf einen Steuerungsimpuls mit gleichen Korrekturschritten. In der nachfolgenden Abbildung sind diese Bereiche „gleicher Korrekturstärke“ farbig markiert. Will man nun die Nachführparameter auf sein Setup abstimmen, muss man zuerst die Korrekturstärke ermitteln. Hierzu macht man einige Tests, wobei man entweder AG und L unabhängig voneinander variiert. Hat man Werte gefunden, die den Leistern gut an seiner Sollposition halten hat man „seinen“ Stärke-Wert bestimmt. Es empfiehlt sich bei diesem ersten Schritt bei grossen Werten beginnend, schrittweise immer kleinere Werte für AG und L zu testen. Bleibt der Leitstern gut fixiert, beobachtet man aber immer noch eine Hin- und Herhüpfen des Sterns, so kann man in einem zweiten Schritt die Nachführungsparameter weiter optimieren.
Man erkennt aus dem Diagramm, dass man, um einen Wert von S beizubehalten, entweder den AG-Wert oder alternativ die Impulslänge L variieren kann.
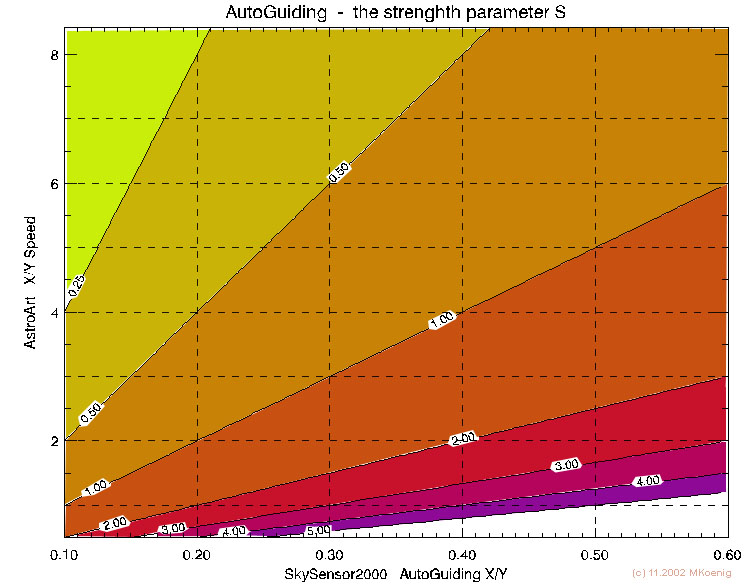
Der zweite Schritte der Nachführkorrektur, behält den gefundenen ersten Wert von S näherungsweise bei, nur werden nur die AG und L Werte weitestmöglich reduziert. Dies ist sinnvoll, da die Stärke des AutoGuidings, d.h. der AG Wert der Abszisse, in gewisser Weise, die ‚Aggressivität‘ des dynamischen Setups beschreibt, d.h. wie stark eine Korrektur die mechanische Stabilität in Anspruch nimmt. Das „Zittern“ des Leitsterns, d.h. die Verteilungsbreite seines Aufenthaltsortes um die Sollposition kann durch diesen zweiten Optimierungsschritt verringert werden. Im Bild des Diagramms gesprochen, bewegt man sich bei dieser zweiten Optimierung nach links unten – unter Beibehaltung der Nachführstärke.
Bei meiner Montierung, einer GP-DX / SkySensor2000, konnte ich feststellen, dass störendes Zittern bei der Nachführung auf einen Mittelwert < 1Pixel verringert wurde. Mitunter gibt es Ausreisser (1..2 Pixel) über diesen Wert, die aber innerhalb eines Korrekturschrittes (2..3 sec) korrigiert werden. Bei meinem Setup entspicht ein Pixel einer Abbildung von weniger als einer Bogensekunde – ich denke diese Nachführungsqualität einer DX kann sich sehen lassen.
Bei meiner Optik (8″ Cassegrain, VC200L, 1800mm Brennweite) konnte ich folgende Idealwerte ermitteln:
AutoGuiding AG RA 0.3
AutoGuiding AG DEC 0.3
AstroArt TelescopeSpeed RA 4..6
AstroArt TelescopeSpeed DEC 2..4
Die Variation der TelescopeSpeed Werte ergibt sich aufgrund der von der Deklination des beobachteten Objektes abhängigen Nachführgeschwindigkeit.